随着自主航行技术的快速发展,无人水面艇(USV)在海洋测绘、环境监测、安防巡逻等领域的应用日益广泛。Pixhawk,作为开源硬件领域的明星项目,凭借其成熟的硬件平台、强大的ArduPilot/PX4开源飞控软件生态以及活跃的开发者社区,为无人艇的敏捷开发提供了坚实的技术基础。本文将探讨基于Pixhawk开源飞控进行无人艇导航系统开发的核心流程、关键技术挑战与解决方案。
一、 系统架构与硬件集成
无人艇导航系统通常由感知、决策、执行三个核心层构成。Pixhawk飞控(通常选用其衍生的如Pixhawk 4或Cube系列)作为系统的“大脑”和决策中枢,负责融合多传感器数据、运行导航算法并输出控制指令。
- 硬件选型与连接:
- 主控制器:Pixhawk飞控板,运行经过适配的ArduRover或PX4 Rover固件。
- 感知传感器:
- 定位:RTK-GPS模块(如Here+或Here3),提供厘米级绝对位置与航向,是导航精度的关键。
- 姿态:飞控内置的IMU(惯性测量单元)提供艇体横滚、俯仰和艏向角速率,结合GPS航向或磁力计(需注意艇上金属干扰)进行姿态解算。
- 避障:可选配激光雷达、毫米波雷达或超声波传感器,用于近距离障碍物检测。
- 环境感知:摄像头(用于视觉识别与跟踪)、风速风向仪等。
- 执行机构:通过Pixhawk的PWM/舵机输出通道连接电调(控制推进电机转速)与舵机(控制舵角),实现对艇体速度和航向的直接控制。
- 通信链路:数传电台(如3DR Radio)用于地面站(如Mission Planner或QGroundControl)的远程监控与任务指令下发;可选4G/5G模块实现超视距通信。
2. 固件选择与配置:
ArduPilot的ArduRover固件或PX4的Rover固件均针对地面/水面载具进行了深度优化。开发者需根据硬件准确选择并烧录固件,随后在地面站进行详细的参数校准与配置,包括:罗盘校准、加速度计校准、舵机输出通道映射、PID控制器参数整定等。
二、 导航算法开发与实现
基于Pixhawk的导航开发,核心在于利用其强大的扩展性,在现有导航框架上实现定制化功能。
1. 航点导航与路径跟踪:
这是最基本的功能。通过地面站规划一系列航点(Waypoints)并下发给飞控。飞控内置的导航算法(如纯追踪算法、线性导航算法)会计算当前位姿与目标航线的偏差,并通过PID控制器生成舵角和油门指令,引导无人艇沿预定路径航行。开发者可以调整跟踪算法的参数(如前瞻距离)以适应不同艇型和海况。
2. 自主避障与局部路径重规划:
这是导航开发的高级课题。Pixhawk固件支持通过MAVLink协议接收外部计算机(如机载Jetson Nano、树莓派)发送的障碍物信息或导航指令。典型的开发模式是:
- 感知传感器(如激光雷达)的数据由协处理器处理,生成局部障碍地图。
- 运行在协处理器上的避障算法(如动态窗口法DWA、时间弹性带TEB)根据全局路径和实时障碍信息,计算出一条安全的局部路径或速度指令。
* 通过MAVLink消息(如SET<em>POSITION</em>TARGET<em>LOCAL</em>NED)将修正后的目标点或速度指令实时发送给Pixhawk飞控执行。
这种方式实现了“Pixhawk负责稳定控制与底层执行,上位机负责智能决策”的异构计算架构。
3. 自适应控制与抗风浪干扰:
水面环境复杂,风、浪、流干扰显著。开发者可以:
- 调整和改进Pixhawk的姿态与位置控制环PID参数,增强其鲁棒性。
- 开发基于模型或数据的自适应控制器,作为Pixhawk的一个外部“插件”,通过MAVLink干预控制量输出,补偿环境扰动。
- 利用状态估计滤波器(如扩展卡尔曼滤波EKF)更优地融合GPS、IMU甚至流速计的数据,提供更准确的位姿估计。
三、 开发流程与工具链
- 仿真测试:在实艇测试前,利用Gazebo、SITL(Software In The Loop)仿真环境至关重要。ArduPilot/PX4都提供了丰富的水面艇模型和仿真世界。开发者可以在仿真中安全地测试导航逻辑、避障算法和参数整定效果,大幅降低开发风险和成本。
- 代码开发与集成:
- 对于简单的逻辑修改或参数调整,可直接修改ArduPilot/PX4固件代码并重新编译。
- 对于复杂的独立功能(如特定的决策算法),更推荐采用模块化开发。使用C++/Python编写独立的功能模块,运行在飞控的Linux外部设备(如配套的配套计算机)或独立的协处理器上,通过MAVLink与飞控通信。这种方式保持了飞控核心的稳定性,也便于算法迭代。
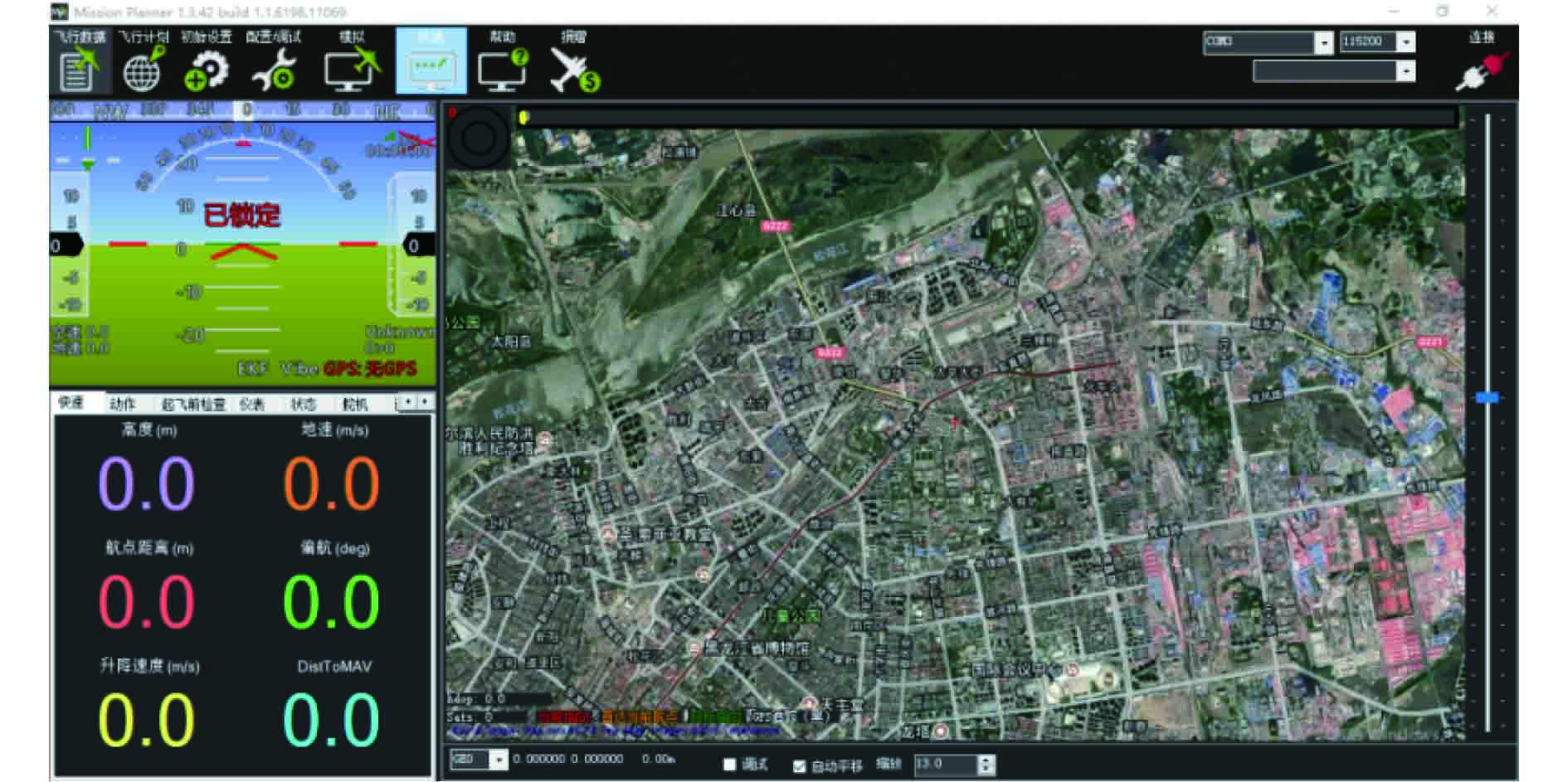
- 地面站与监控:Mission Planner和QGroundControl提供了强大的任务规划、参数调整、实时遥测数据监控和日志分析功能。深入利用这些工具,是调试和优化导航性能的关键。
四、 挑战与展望
基于Pixhawk开发无人艇导航的挑战主要在于:水面动力学建模的复杂性、传感器(尤其是磁力计)在艇上受干扰的补偿、复杂海况下的可靠性保证,以及多艇协同的通信与调度。
随着Pixhawk生态的持续演进(如对ROS 2的更佳支持、更强大的协处理器集成),以及AI技术的融合,基于此平台将能开发出更智能、更适应复杂环境、具备更强集群协作能力的无人艇导航系统。开源的力量,正持续降低无人艇技术的门槛,推动着海洋智能化应用的蓬勃发展。